Les services hospitaliers se sont dégradés remarquablement durant les dernières années.En effet, les tâches hospitalières sont de plus en plus complexes et le manque du personnel ne cesse de s’accentuer de jour en jour. Toutes ces contraintes ainsi que les proclamations incessantes des patients à propos du retard et du manque d’efficacité imposent l’emploie de méthodes modernes d’assistance dans le travail hospitalier. Avec le développement incessant de la technologie l’utilisation des systèmes robotisés devient de plus en plus répandue dans la majorité des domaines. Nous pouvons citer les systèmes de parking automatiques et les robots astronautes.
L’automatisation des tâches hospitalières par le biais de systèmes robotisés offre un grand nombre d’avantages pour les infirmiers responsables de tâches faciles et exigeantes en terme de temps. La livraison des pilules, à titre d’exemple, aux malades hébergés dans l’hôpital dans un temps précis et dans des endroits précis de l’hôpital correspond à ce type de tâches. C’est dans ce cadre que s’insère ce projet de développement et de conception (PCD || P2M) effectué au sein de l’Ecole Nationale des Sciences de l’Informatique (ENSI-Tunisie).
Notre projet consiste à construire un système permettant l’automatisation des tâches de livraison des médicaments au sein d’un hôpital. Ce système assurera la saisie de commandes de livraison par un utilisateur à travers une interface de commande. Il permettra aussi de réaliser ces commandes et d’aller livrer le médicament au malade concerné.

L’utilisateur utilise l’interface de commande pour saisir les commandes qui sont constitués des coordonnées des malades du type de leurs médicaments, de la date de prise du médicament et de la date de départ du malade. Ces données sont enregistrées dans une structure de données et sont sollicités lorsque la date de livraison est atteinte. Le robot qui prend ces données à partir de l’interface de commande se déplace dans l’hôpital jusqu’à atteindre l’emplacement du malade qui est donné dans la commande.
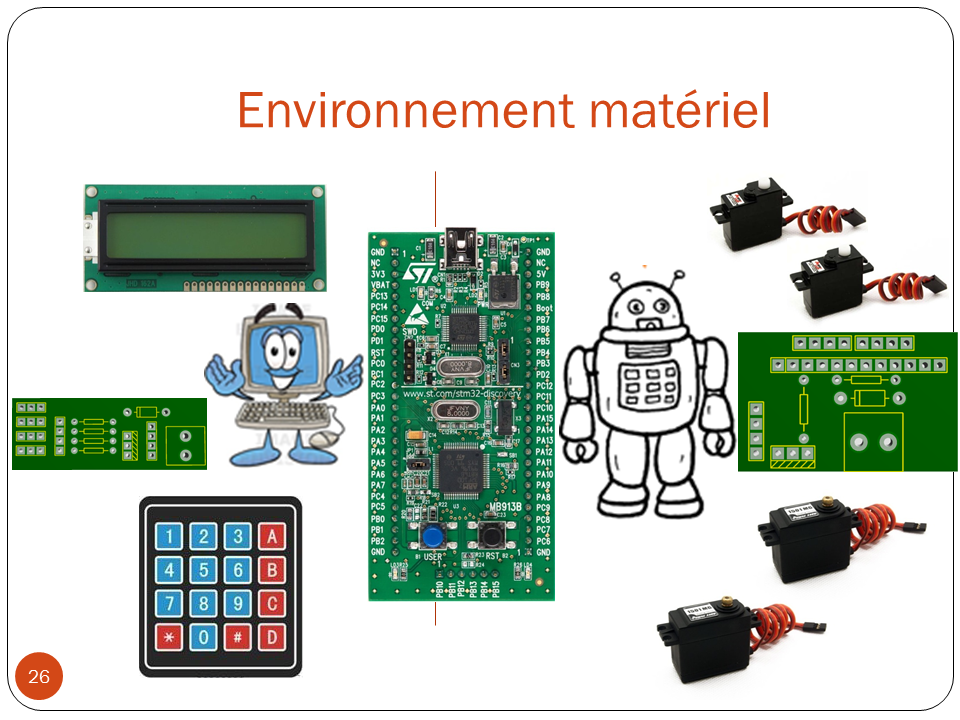
Pour la réalisation:
- Deux kits STM32VLDISCOVERY
- Écran LCD16*2 JHD126A
- Keypad 4*4
- Deux servomoteurs POWER HD 1501 MG
- Deux Mini servomoteurs POWER HD 1160A
- Deux PCB. (commande des servo & LCD )

Je tiens à remercier mes binômes, notre encadrent, toutes "la famille" du Club ROBOTIQUE ENSI ainsi tous qui ont contribué de près et loin à ce projet.

L’automatisation des tâches hospitalières par le biais de systèmes robotisés offre un grand nombre d’avantages pour les infirmiers responsables de tâches faciles et exigeantes en terme de temps. La livraison des pilules, à titre d’exemple, aux malades hébergés dans l’hôpital dans un temps précis et dans des endroits précis de l’hôpital correspond à ce type de tâches. C’est dans ce cadre que s’insère ce projet de développement et de conception (PCD || P2M) effectué au sein de l’Ecole Nationale des Sciences de l’Informatique (ENSI-Tunisie).
Notre projet consiste à construire un système permettant l’automatisation des tâches de livraison des médicaments au sein d’un hôpital. Ce système assurera la saisie de commandes de livraison par un utilisateur à travers une interface de commande. Il permettra aussi de réaliser ces commandes et d’aller livrer le médicament au malade concerné.

L’utilisateur utilise l’interface de commande pour saisir les commandes qui sont constitués des coordonnées des malades du type de leurs médicaments, de la date de prise du médicament et de la date de départ du malade. Ces données sont enregistrées dans une structure de données et sont sollicités lorsque la date de livraison est atteinte. Le robot qui prend ces données à partir de l’interface de commande se déplace dans l’hôpital jusqu’à atteindre l’emplacement du malade qui est donné dans la commande.
Pour la réalisation:
- Deux kits STM32VLDISCOVERY
- Écran LCD16*2 JHD126A
- Keypad 4*4
- Deux servomoteurs POWER HD 1501 MG
- Deux Mini servomoteurs POWER HD 1160A
- Deux PCB. (commande des servo & LCD )
Je tiens à remercier mes binômes, notre encadrent, toutes "la famille" du Club ROBOTIQUE ENSI ainsi tous qui ont contribué de près et loin à ce projet.